
We use cookies to ensure our website works properly and to personalise your experience. Cookies policy
Department of Naval Architecture and Offshore Engineering, AMET University
Seakeeping in hip motion analysis refers to the capability of a ship to maintain performance and stability under various sea state conditions. Seakeeping analysis is essential for assessing the safety and operational effectiveness of a ship’s hull in response to wave-induced motions. In this study, the focus is on the degrees of freedom in sea conditions and the influence of wave interactions on the ship’s motions. The six degrees of freedom considered are: Surge, Sway, Heave, Roll, Pitch, and Yaw. The primary objective of the study is to analyze the three translational motions and the rotational motions using a bulk carrier ship model. Numerical tools were employed to carry out the seakeeping motion wave analysis, which includes evaluation of the Body mass parameters with regular waves, Response Amplitude Operators (RAOs), Damping factors and Radius of gyration. This study analyzed the final induced motions occurs on the bulk carrier ship model hull, the speed of the ship 15 knots the heave response amplitude operator (RAO) is greater than at the speed of 10 knots, due to this it finalized that the higher heave and roll will occur due to the high speed motions, but there will be a high heave motions and minimum roll motions
1.1 Literature Review:
A Ship in ocean is used for the goods transportation’s from one island to another island through oceans. Bulk carrier ship is basically designed for the transportation of unpacked bulk cargos such as wheat, grains, Iron ore, coals and other materials. The Bulk carrier ship will have large and unobstructed cargo holds, will have hatch covers for loading and unloading the materials, and it also used for carrying dense materials. Bulk carrier ships will have single deck with multiple cargo holds. For this bulk carrier, the design considerations will have a high strength to handle heavy cargos. The types of bulk carriers are “Handy-size ship with 10,000 to 35,000 ton deadweight”, “Supramax ship with 50,000 to 60,000 ton deadweight”, “Panamax ship with 60,000 to 80,000 ton deadweight”, “Capesize ship with over 1,50,000 ton deadweight”. These are some types of bulk carrier ships which will use for the large and small transportation process through oceans. “[3]”
Seakeeping motions analysis are identifies at the movement of the ship hull on ocean. It defines the capability of ship’s hull and to check the performance of ships motions at any various sea state conditions. Seakeeping analysis helps to determine the safety and stability of ship’s hull motions. Due to unpredictable sea conditions, like high tides, storms, to the change of climate at any time in oceans, for this the seakeeping analysis of ship hull motions, are analysed using the numerical tool. When the waves of sea conditions increases at some point, the ship hull motions, the speed and loading conditions will affect the performance of a ship. The wave height’s and the wave propagates the wave determination of ship’s motions. “[9, 7]”
The movements of the motions which acts on ship like heaving, rolling, pitching will affects the goods which are transported on ship and also the comfort and safety of the crew members on board. Based on the criteria of wave heights on ocean, the ship operates according to the performance specifies. The aim of this study is to focus on the “three translational motions, and heave roll and pitch rotations were carried out on the model of Bulk carrier ship”. Using the numerical tool the Response Amplitude Operator (RAO), damping factor, radius of gyration, are analysed for the seakeeping motions on ship. For the wave excitation at various frequencies, this RAO is analyzed for the seakeeping analysis and in figure 1 it explains the degrees of freedom acting on the ship motions on the sea conditions.
In the sea, the performance of the ship motions, the parameters of the ship plays a virtual role’s, such as sea conditions, speed of a ship, relationship between length of a ship to the wave length, and the waves of the ships with respect to the ship performance. The three main primarily that concerned with the ship designer with their qualities are: ship operability, ship’s habitability, ship’s survivability. These three things will be considered by the designer of the ship’s motions in the seakeeping methods. The ship’s habitability deals with the human comfort and the ship’s performance on board. These requirements are depends on the type of ship’s and the ship mission. Example for a passenger ship a higher degree of habitability is required than a merchant vessel. The ship’s operability deals with the ship’s ability, and all equipment’s of mechanical things, and the ship’s instruments system on board. The operation also deals with the carry of the crew members to the sea.
Survivability of the ship deals with the safety of the ship, and the cargo, when the sea condition becomes rough, and the ship are in the danger condition. These three qualities, are some different in their working nature, these will affect the following aspects, they are motions of ship’s like heave, surge, sway, roll, pitch and yaw, and the ship accelerations, particularly in the transverse and vertical directions. Thus these three quantities will mainly depends on the ship types and the ship’s missions.
The design of the ship which evaluates the performance of ship, the probabilities of the ship certain levels are exceeded, and it makes the task not easier. To check the dangerous conditions in rough sea’s, the seakeeping analysis are used to analysis the performance acting on the ship. This study undergoes the seakeeping analysis on bulk carrier ship hull model with the deadweight of 80,000 T ton. The motions of the ship hull performs the response of the Response Amplitude Operator (RAO). Motion analysis software were used to check the performance of this ship hull motions. Wave length, wave heights, hull separation ratios are used for this analysis used in the ship motions are performed.
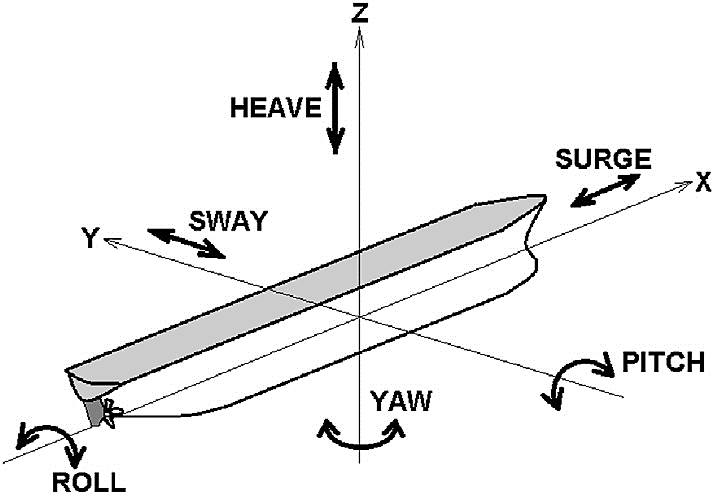
Figure 1: Six degrees of freedom in vessel motions (Source: Evaluation of the Human Discomfort Caused by Ship Vibrations, Research gate, publication)
An investigation paper study by Kantaro Suzuki, Hidetsugu Iwashita, on the title of Experimental and Numerical Study on the Seakeeping Performance of a Wind-Powered Generation Ship Considering Boom Configurations, the paper analysed that, the performance of the seakeeping in a wind powered generator ship, it focus on the impact on the configurations of the boom. Using the analysis numerical tool, it performs the hull ship speed and boom presence affect the ship motions “[1]”. A paper study by Amalia Ika Wulandari et al, on the title of Seakeeping Performance of Warship Catamaran under Varied Hull Separation and Wave Heading Conditions: An Integrated Numerical and Experimental Studies, the study explains the experimental research and numerical analysis of the methods that were used to analysis in the seakeeping motion analysis, were the performance of the hull with wave headings and the hull separations variations acting on the ships, and the optimal performance observed on the ship separation to the length ratio i:e S/L ratios. “[2]”
A study investigates by the A. Fitriadhy, N.S. Razali, and N. Aqilah Mansor, on the title of Seakeeping Performance of a Rounded Hull Catamaran in Waves Using CFD Approach, the paper study analysis the seakeeping motions performances on the ship catamaran hull using the CFD analysis tool, and it also optimizes the hull variations, wave lengths, and the variations of the Froude numbers calculations acting on the ship hull motions in the catamaran design “[4]. “
A journal paper study investigates by Hamzah, on the title of Analysis of Wave Height to Ship Motion with Displacement of 7,597 Tons by Finite Element Method, this study analysed the performance of seakeeping motions that the wave height varying on the ship speeds and also in ship motions, to analyses this performance the study utilizes the finite element methods acting on ship hull. The findings indicates the performance of seakeeping motions, the significant motions responses on the wave directions emphasizing the environmental conditions. “[5]”
A journal paper study by Karol Niklas et al, on the title of Determination of Seakeeping Performance for a Case Study Vessel by the Strip Theory Method, the study investigates the ship analysis of the seakeeping performances, using the strip theory method and it evaluates the hull motions like heaving and pitching, and MSI method (motion sickness incidence), subjective magnitude (SM) method, and these methods are highlighting the practical limitations of the theory method “[6]”.
Response Amplitude Operator is define as the ratio of Ship motion amplitude to the wave amplitude of incoming waves as of wave frequency or wave period. It denotes in ω à wave frequency in rad/ sec.
Response Amplitude Operator (RAO) ω = Response Ship motion amplitudeWave amplitude

The analysis of seakeeping motions interpreting with ship motions when:
Radius of gyration measures how the mass of ship as been distributed around a particular axis and it examines on the calculation of ship moment of inertia. It denotes in k à radius of gyration.
Radius of gyration k = √ (I / m)
Where, I is the moment of inertia about axis and m is the mass or displacements of ship. The radius of gyration is the input value for checking seakeeping motions analysis in the numerical tool for the ship. It helps to assess the resonance of sea conditions in waves. By checking the IMO criteria, for the stability and regulatory compliance these radius of gyration are mainly used.
3.1. Hull model bulk carrier ship:
The model of the ship hull bulk carrier are designed using the rhino numerical tool software, and the hull model is imported to Maxsurf for the stability and hydrostatic calculations. The analysis of the seakeeping performance for this bulk carrier using the parameters, the hull is imported in the Maxsurf motions numerical tool for further process of the work.
The bulk carrier with 80,000 ton deadweight is designed using the Parent ship analysis and ship particulars, and the hull is generated using the lines plan in rhino numerical tool. Once the hull is generated, it imported in the maxsurf numerical tool for further analysis, like stability calculations, hydrostatic calculations, and the performance of the seakeeping analysis are finally analysed using the maxsurf motions numerical tool.
|
Length over all (LOA) |
245.90 m |
|
Length between perpendicular (LBP) |
236.72 m |
|
Breadth (B) |
30.38 m |
|
Draft (T) |
13.56 m |
|
Depth (D) |
19.70 m |
|
Light ship weight (LSW) |
12407.30 T |
|
Block coefficient (CB) |
0.79 |
|
Deadweight |
80,000 T |
|
Speed |
15 Knots |
Table 1: Bulk carrier ship parameter

Figure 2: Bulk Carrier Hull Model design
Table 1 represents the ship model bulk carrier parameters taken for the seakeeping analysis, by this parameters, the offset tables are generated and lines plan for hull model is created using the AutoCAD numerical tool. From the AutoCAD numerical tool, the lines plan is imported to the rhino tool for hull generation from 2D to 3D surface. The stage 1 method is performed using the numerical tools and the further seakeeping analysis is investigated from Maxsurf motions numerical tools.
3.2 JONSWAP spectrum method analysis:
JONSWAP spectrum is known as Joint North Sea Wave Project, this project is used for the seakeeping analysis, which defines the distribution of the energy in the ocean frequency. This spectrum is used to measure the wave frequencies in ocean. It is also a limited version of a Pierson Moskowitz Spectrum wave version that except the wave is not fully developed and may be continue to develop the nonlinear wave interactions for a long time. The JONSWAP spectrum terms used for the analysis are wave distance as specified by α, peak distance as specified by γ terms. “[6]”
The JONSWAP spectrum in terms of frequency equation is
S(f) = α*g2(2π)-4*f-5*exp(-5/4(fp/f)4)*γexp(-(f-fp)2/(2α2*f2p))
Where, g à acceleration due to gravity
α à constant value
γ à peak factor
ωp à peak angle frequency
ω à angular frequency
The above equation is used for the frequency on the seakeeping motion analysis and the terms used in the equation are given in the above data’s.
The working methodology of the process done in seakeeping motion analysis using the numerical tools, are:
4.1 Stability calculation seakeeping analysis for bulk carrier ship:
Ship stability refers to the vessel ability when return to the upright position after tilted by the external forces, such as waves, wind and loading conditions. The three types of ship stability equilibrium that are usually taken place are stable equilibrium, unstable equilibrium, neutral equilibrium. This ship stability will check the IMO regulations criteria. Cross curves of stability shows a graphical representation, which shows the righting arm, at a various angle of heel and the ship displacement. “[11, 12]”
The righting arm GZ curve value is calculated as
GZ = KN*sinθ – KG* sinθ
The manual calculations that used for this stability using the cross curves the graph plot is shown in the below figure graph.
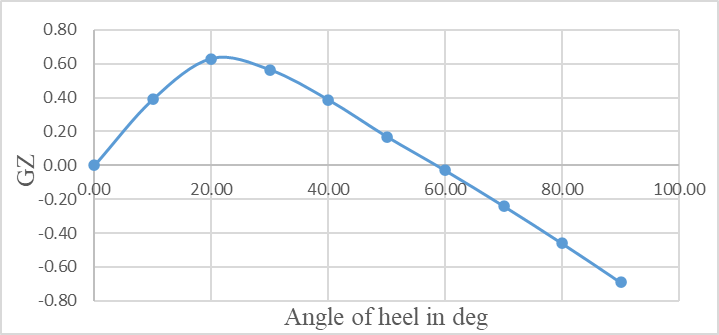
Figure 3: GZ stability curve between Angle of heel to GZ value
The curve of the stability angle between angles of heel to the stability righting arm curves the data’s are shown in the table 2.Thus by this graph, the angle of vanishing stability will occur at the angle 60°.
|
Angle of heel |
GZ(value) |
|
0.00 |
0.00 |
|
10.00 |
0.39 |
|
20.00 |
0.63 |
|
30.00 |
0.56 |
|
40.00 |
0.39 |
|
50.00 |
0.17 |
|
60.00 |
-0.03 |
|
70.00 |
-0.24 |
|
80.00 |
-0.46 |
|
90.00 |
-0.69 |
Table 2: Angle of heel to the GZ curve values
|
Speeds |
Wave heights |
Wave spectra |
Front Angles |
|
10 knots |
4 m |
JONSWAP |
0° |
|
15 knots |
6 m |
JONSWAP |
45° |
|
- |
10 m |
JONSWAP |
90° |
|
- |
- |
- |
180° |
Table 3: Data values for seakeeping analysis
4.2 Speed value of a hull and wave heights analysis:
The bulk carrier ship the hull model for this seakeeping analysis, the speed of the hull and the waves heights are investigated using the wave frequency and the seakeeping analysis motions. “[9]”
The values for the speed motions analysed for this hull model are chosen as 10 knots and 15 knots, and the wave heights are investigates as 4m, 6m and 10m. By these values, the hull motions heave degree and roll degree calculations are analysed. The values entered for the seakeeping analysis wave induced motions, are shown in the table 3.
4.3 Response amplitude operator analysis:
4.3.1 Speed Seakeeping analysis at 10 knots:
The calculation of the wave heights and the speeds 10 knots, at an angle of 0° degree, the response amplitude operator graph are shown in the below figure 4, the graph represents the maximum heave motions occurs on the seakeeping analysis of the ship hull, than Roll RAO, and it investigates the seakeeping motion analysis, the roll motion will occur zero and the ship hull heave motion will occurs maximum analysis. “[9]”
4.3.2 Speed Seakeeping analysis at 15 knots:
The calculation of the wave heights and the speeds 15 knots, at an angle of 0° degree, the response amplitude operator are calculated, the graph represents the maximum heave motions occurs on the seakeeping analysis of the ship hull, than Pitch RAO. The calculation of the wave heights and the speeds 15 knots, at an angle of 90° degree, the response amplitude operator graph is shown in the below figure 5, and it investigates the seakeeping motion analysis, the roll motion will occur zero and the ship hull heave motion will occurs maximum analysis. “[9]”
Figure 4: Speed 10 knots at an angle of 0°
Figure 5: Speed 15 knots at an angle of 90°
This study investigates the study of the seakeeping performance of a bulk carrier ship hull, which subjected to the wave-induced seakeeping motion analysis. The vessel examines the performance of the degrees of freedom such as heave, roll, pitch motions using the sea conditions. This paper suggested the wave spectra analysis which is JONSWAP spectra used for the seakeeping analysis to simulate the irregular wave environments.
This paper employs the numerical methods are strip theory, response amplitude operators (RAOs) which used for the seakeeping motion analysis output calculation using the numerical tool. These analysis are evaluate for the high experimental data’s which simulate the higher frequency to ensure accuracy. Thus this paper study analysis the understanding of the wave forces which acts on the bulk carrier ship vessel hull, and thus it finalized the on-board comfort and the stability for the ship design optimize and the safety conditions on the vessel. “[3]”
CONCLUSION
A paper study of these analysis were investigated that the model of the ship hull seakeeping analysis parameters, it concluded that the maximum heave motions of ship degrees of freedom are analysed with the different wave heights and these are calculated using the numerical tools. The hull designed using the numerical tool are imported in the Maxsurf motions tool for further analysis of induced wave seakeeping motions.
The following conclusions are taken investigated for the study parameters for the design steel model specimens, are described below:
For the different speed conditions, and the different wave heights which are analysed, it is conclude that the speed of 10 knots the maximum Roll motion RAOs will occur higher than the speed of 15 knots for the wave heights of 4 meter, 6 meter and 10 meter.
REFERENCES


Joel Joshua N.*, P. Sivabalan, Wave-Induced Seakeeping Analysis Of A Ship Hull, Int. J. Sci. R. Tech., 2026, 3 (5), 914-920. https://doi.org/10.5281/zenodo.20395911
 10.5281/zenodo.20395911
10.5281/zenodo.20395911