
We use cookies to ensure our website works properly and to personalise your experience. Cookies policy
Dept. Of Computer science & Engineering, Shreeyash college of Engineering, Chh. Sambhajinagar, India
Object detection is an important area in computer vision and is widely used in applications such as security systems, autonomous vehicles, robotics, traffic monitoring, and healthcare. In recent years, there has been a growing need for fast and accurate object detection methods that can work in real time. To achieve this, deep learning-based algorithms have become very popular, especially the YOLO (You Only Look Once) algorithm. YOLO is one of the fastest and most efficient object detection algorithms because it detects and classifies objects in a single step using Convolutional Neural Networks (CNN). Unlike traditional methods that require multiple stages for detection, YOLO processes the entire image at once, which improves speed and makes it suitable for real-time applications. This review paper presents the working principle, architecture, and development of different YOLO versions such as YOLOv1, YOLOv2, YOLOv3, YOLOv4, YOLOv5, YOLOv7, and YOLOv8. The study also explains how each version improves detection accuracy, processing speed, and overall performance. In addition, various real-world applications of YOLO in surveillance systems, smart transportation, industrial automation, and medical image analysis are discussed. The paper also highlights the advantages of YOLO, including high speed, simple architecture, and real-time performance. At the same time, some limitations such as difficulty in detecting very small objects and crowded scenes are also mentioned. Overall, this paper provides a detailed review of the YOLO algorithm and its role in enhancing real-time object detection systems.
Object detection is one of the most important applications of computer vision and artificial intelligence. It is used to identify and locate objects within images and videos. In recent years, object detection technology has gained significant attention because of its wide use in areas such as video surveillance, autonomous vehicles, robotics, healthcare, industrial automation, and smart traffic systems. The main objective of object detection is not only to recognize objects but also to determine their exact position in an image using bounding boxes.
Traditional object detection methods were mainly based on manual feature extraction techniques and machine learning algorithms. These methods required separate processes for feature extraction, classification, and localization, making them slower and less effective for real-time applications. With the development of deep learning and Convolutional Neural Networks (CNNs), object detection systems have become faster, more accurate, and more reliable.
Among the various deep learning-based object detection algorithms, YOLO (You Only Look Once) has become one of the most popular approaches for real-time object detection. YOLO treats object detection as a single regression problem and performs classification and localization in one step. Unlike traditional region-based detection methods, YOLO processes the entire image at once through a neural network, which significantly improves detection speed. Due to this capability, YOLO is highly suitable for real-time applications where quick decision-making is required.
The YOLO algorithm has evolved through several versions such as YOLOv1, YOLOv2, YOLOv3, YOLOv4, YOLOv5, YOLOv7, and YOLOv8. Each version introduced improvements in accuracy, speed, and detection performance. These advancements have made YOLO one of the leading object detection frameworks in modern computer vision research.
This paper focuses on enhancing real-time object detection using the YOLO algorithm. It presents an overview of the YOLO architecture, working mechanism, different versions, advantages, limitations, and practical applications. The study also discusses how YOLO contributes to efficient and accurate object detection in real-world scenarios.
Problem Statement
Traditional object detection methods are often slow and computationally expensive, making them unsuitable for real-time applications such as surveillance, autonomous vehicles, and robotics. Although the YOLO algorithm provides fast and accurate object detection, challenges such as small object detection, crowded scenes, and deployment on low-resource devices still exist. Therefore, there is a need to analyze and improve YOLO-based techniques to achieve better accuracy and real-time performance in practical applications.
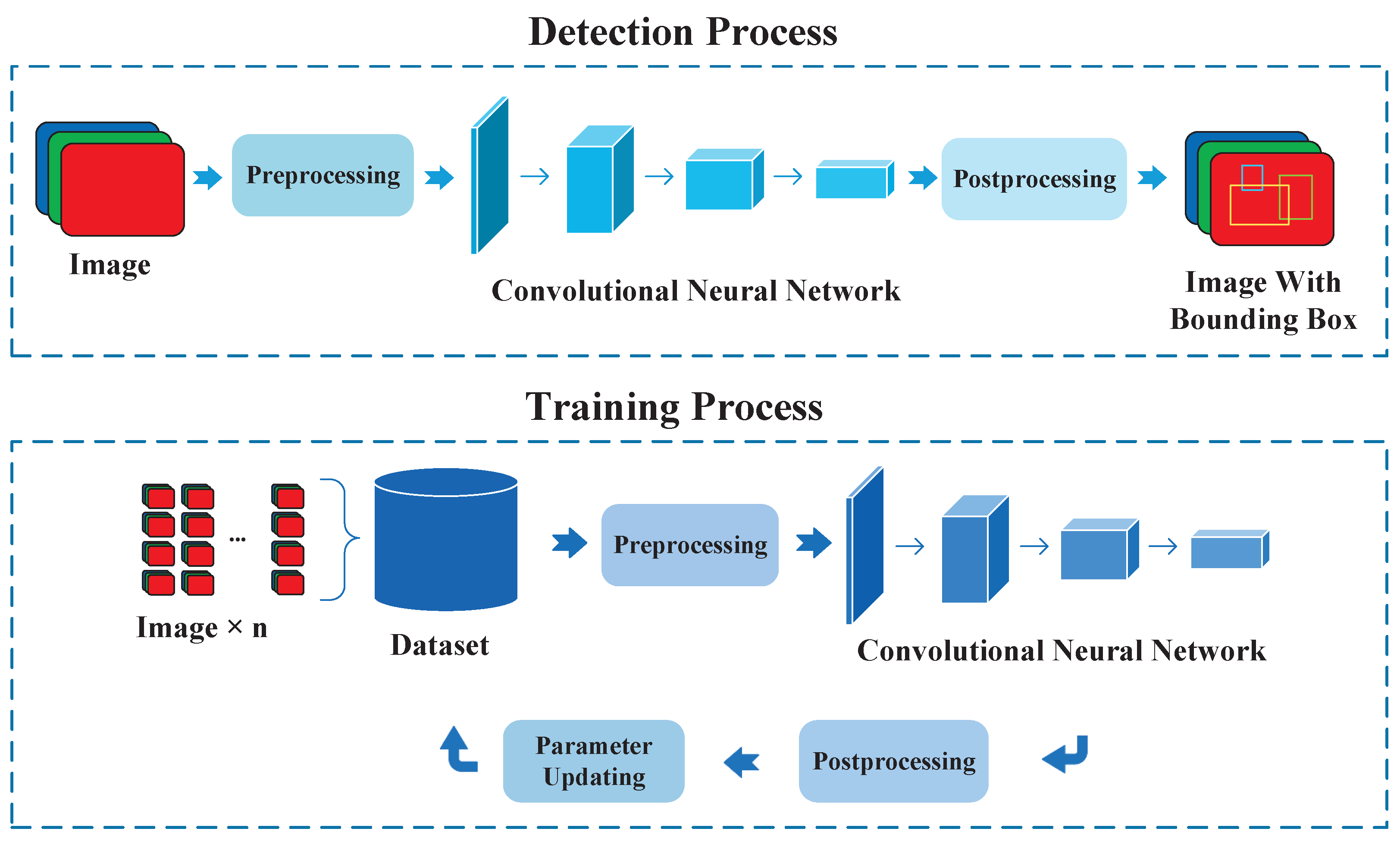 Fig.1: Block diagram
Fig.1: Block diagram
|
YOLO Version |
Year |
Main Feature |
Advantages |
Limitations |
|
YOLOv1 |
2016 |
Single-stage object detection |
Very fast detection speed |
Lower accuracy for small objects |
|
YOLOv2 |
2017 |
Batch normalization and anchor boxes |
Improved accuracy and speed |
Difficulty in dense object detection |
|
YOLOv3 |
2018 |
Multi-scale prediction |
Better small object detection |
Larger model size |
|
YOLOv4 |
2020 |
CSPDarknet53 backbone |
High speed and accuracy |
Requires powerful GPU |
|
YOLOv5 |
2020 |
Lightweight and easy implementation |
Faster training and deployment |
Not officially released as research paper initially |
|
YOLOv6 |
2022 |
Industrial optimization |
Efficient for industrial applications |
Less academic documentation |
|
YOLOv7 |
2022 |
Enhanced trainable features |
High real-time accuracy |
Complex architecture |
|
YOLOv8 |
2023 |
Anchor-free detection |
Better accuracy and flexibility |
Higher computational requirement |
Table 1: Comparison of Different YOLO Versions
Although YOLO algorithms have shown significant improvements in real-time object detection, several research gaps still exist. Early versions such as YOLOv1 and YOLOv2 mainly focused on increasing detection speed, but their accuracy for detecting small and overlapping objects was limited. Later versions improved accuracy and feature extraction, but challenges still remain in complex environments.
One major research gap is the detection of very small objects in crowded scenes. In applications such as traffic monitoring, drone surveillance, and medical imaging, small objects are difficult to detect accurately. Another challenge is maintaining high accuracy under poor lighting conditions, fog, rain, or blurred images.
Most advanced YOLO models also require high computational power and GPU resources, which limits their use in low-cost embedded systems and mobile devices. Researchers are still working on lightweight YOLO models that can provide both high accuracy and low processing time.
Another research gap is real-time detection in edge computing and IoT devices. Many existing models perform well in high-performance systems but face difficulties when deployed on microcontrollers, Raspberry Pi, or low-memory devices. In addition, there is a need for improving object tracking, reducing false detection rates, and enhancing performance for multi-object detection in dynamic environments. Future research can focus on combining YOLO with artificial intelligence, edge computing, and optimization techniques to improve overall detection performance.
Although the YOLO (You Only Look Once) algorithm is widely used for real-time object detection because of its high speed and efficiency, it still has several limitations that affect its performance in certain situations. Difficulty in Detecting Small Objects: YOLO sometimes struggles to detect very small objects, especially when multiple small objects are present in the same image. Since the image is divided into grids, smaller objects may not be represented properly within a grid cell.
CONCLUSION
The YOLO algorithm has become one of the most powerful and widely used object detection techniques in computer vision. Its ability to perform object localization and classification in a single step makes it highly suitable for real-time applications such as surveillance systems, autonomous vehicles, robotics, healthcare, and industrial automation.
Over the years, different YOLO versions have improved significantly in terms of speed, accuracy, and detection performance. From YOLOv1 to YOLOv8, each version introduced new techniques to overcome the limitations of previous models. Among these versions, YOLOv8 provides the best balance of accuracy, flexibility, and real-time performance.
Despite these advancements, challenges such as small object detection, high computational requirements, and deployment on low-cost devices still exist. Future research can focus on lightweight architectures, improved feature extraction, and AI-based optimization methods to further enhance object detection systems.
Overall, YOLO continues to play an important role in the development of intelligent real-time vision systems and remains a leading solution in modern object detection research.
REFERENCES

Madhuri Nanasaheb Borse*, Vijaykumar M. P., Enhancing Real-Time Object Detection With Yolo Algorithm, Int. J. Sci. R. Tech., 2026, 3 (6), 992-996. https://doi.org/10.5281/zenodo.20717957
 10.5281/zenodo.20717957
10.5281/zenodo.20717957